Abstract
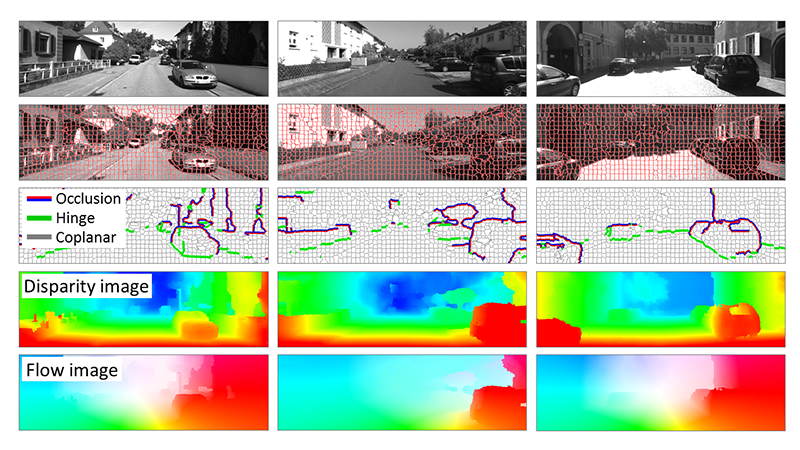
In this paper we propose a slanted plane model for jointly recovering an image segmentation, a dense depth estimate as well as boundary labels (such as occlusion boundaries)
from a static scene given two frames of a stereo pair captured from a moving vehicle.
Towards this goal we propose a new optimization algorithm for our SLIC-like objective which preserves connecteness of image segments and exploits shape regularization in the form of boundary length.
We demonstrate the performance of our approach in the challenging stereo and flow KITTI benchmarks and show superior results to the state-of-the-art. Importantly, these results can be achieved an order of magnitude faster than competing approaches.
Paper
Koichiro Yamaguchi, David McAllester, Raquel Urtasun,
"Efficient Joint Segmentation, Occlusion Labeling, Stereo and Flow Estimation"
[pdf]
European Conference on Computer Vision (ECCV), 2014.
Code
This code is licensed under the
GNU General Public License Version 3 (GPLv3).
SPS-Stereo (Stereo-only version)